4.3 转向系统
运梁车的每组悬挂上配置1条转向油缸、1个旋转编码器和1组比例阀实现全轮独立转向。独立转向系统使得每个悬挂轮组的角度均为可控,这样使得转向更为灵活,不仅能满足八字转向、半八字转向还能满足运梁车斜行和首尾轴固定转向,斜行和首尾轴固定转向功能在实际使用中也是非常重要的,特别是首尾轴固定转向,更容易实现在小半径曲线上作业。运梁车轮组最大转向角度为±30°,可以实现的内侧最小转弯半径为26.3米,外侧最小转弯半径为39.8米,最大负荷时可以实现静止转向。
转向系统由三部分组成:转向机构、液压系统和微电控制系统。 传动链是:微电系统根据驾驶员转动方向盘的信号,由微电控制器向电液比例阀发出指令,控制阀按指令要求控制(阀门)开或关,大或小,转向油缸即随之动作,推动连杆机构使转向轮转动,同时由(转向轮上的)旋转编码器将转动值反馈到微电控制器。可见,转向机构的传动链是一闭环控制系统。
在方向盘下联接有一套电子安保设施,即"磁粉离合器",其作用是:当方向盘的(转角)信号与实际轮胎转角有误差时,磁粉离合器即按微电控制器指令产生"阻尼作用(方向盘手感加重)",误差越大阻尼也越大,当误差达6°,方向盘的阻尼达最大(锁紧),并使整车自动停止运行。

图4.3 转向机构
转向机构的作用如下:
|
1 |
作为整机的转向机构,在控制系统作用下实现各种转向功能 |
更详细信息请参阅转向机构图:DCY900-05.00.00。
4.4动力系统
动力系统由发动机、弹性联轴器、分动箱和变量泵组成。两台400kW道依茨发动机集中布置在运梁车后端,这种双动力系统增大了系统可靠性,当一套系统出现故障时,也能实现车辆顺利行驶到终点(驱动能力不变,速度降低一倍)。每台发动机通过分动箱同时驱动4台泵,为驱动系统、转向系统、悬挂系统等提供液压动力源。
4.4.1发动机
采用华北发动机厂组装德国进口道依兹水冷发动机。该机型适用于轨道、石油及特种工程机械,具有扭矩大,油耗低、使用成本低等特点。具体参数见下表:
| 序号 | 项目 |
技术参数 |
| 1 | 型号 |
BF8M1015C/P |
| 2 | 缸径×冲程 |
132×145 mm |
| 3 | 排量 |
15.874 l |
| 4 | 吸气方式 |
增压中冷 |
| 5 | 启动方式 |
电启动 |
| 6 | 冷却方式 |
水冷 |
| 7 | 额定功率/转速 |
400kW/2100r/min |
| 8 | 最大扭矩/转速 |
2300 Nm/1300r/min |
| 9 | 最低怠速 |
500 r/min |
| 10 | 最低燃油消耗率 |
189 g/kw.h |
| 11 | 排放水平 |
欧Ⅱ |
4.4.2分动箱及液压泵
分动箱通过弹性联轴器与发动机联接。每台发动机要同时驱动4台泵,因此设计采用二个分动箱,考虑接口功率、安装空间等问题,每个分动箱设2个输出接口。

图4.4 动力系统
动力系统的作用如下:
|
1 |
作为整机的动力模块,为驱动、悬挂、转向、支撑等机构提供动力源。 |
更详细信息请参阅动力系统图:DCY900-06.00.00。
4.5 制动系统
整车配置有液压制动和气压制动,制动平稳、可靠。具有行车制动、驻车制动和紧急制动功能。
行车制动:行车过程制动主要通过控制驱动液压系统来实现。当操作者释放车速脚踏板时,变量驱动泵排量逐步降低,车速也随之降低。当脚踏板完全松开,变量泵排量为0,在液压阻尼的作用下,实现行车制动直至停车。
驻车制动:气压制动,通过手刹实现。
紧急制动:紧急情况下,操作者首先抬脚释放行车控制脚踏板,驱动系统停止供油,液压阻尼使得系统减速;踩下刹车脚踏板,使压缩空气从储气罐通过控制阀直接供给隔膜式制动气室,系统快速减速并实现紧急制动。
制动系统的作用如下:
|
1 |
为车辆提供制动功能,确保行车安全 |
更详细信息请参阅空气制动系统图:DCY900-07.00.00。
4.6 液压系统
液压系统由液压驱动系统、液压转向系统、液压悬挂系统和液压支撑系统等组成,详见液压系统图。
驱动液压系统是由变量泵、电磁阀、液压管路及变量马达组成的闭式系统。泵的变量采用电子控制,根据车辆的实际负载,改变主泵或马达的工作参数;另外,各驱动轮之间的"差力差速" 问题,可能出现的"打滑" 问题,微电系统都瞬时加以控制,使驱动系统及时恢复正常。液压驱动系统通过微电控制,达到充分利用发动机功率,提高生产率,节约能源的目的。
转向和悬挂是由液压泵、液压阀、及液压油缸组成的多泵并联合流供油开式系统。转向系统采用油缸驱动的独立转向方案。各油缸动作都由微电系统控制,驱动整车转向。悬挂采用液压油缸悬挂,其升降是操纵比例电磁阀,由液压油缸来执行。液压悬挂系统配置双管路油管破损安全阀,保证一旦油管破裂,其他油管均保证正常油压,以避免箱梁运梁车倾斜。
考虑满载时车架变形问题,尤其在拖梁过程产生交变变形情况,主油管采用无缝钢管联接高压软管方案。 无缝钢管随车架分段,各分段之间以高压软管联接。
4.7 电气控制系统
整车通过工程机械专用控制器来控制车的各个动作,具有控制精度高,反应速度快,故障率低,防护等级高等特点;控制器之间通讯采用国际上流行的CAN总线通讯,具有抗干扰能力强,通讯速度快等特点,同时大量减少了电缆的使用量,降低了系统故障率。
整个控制系统由车电控制系统和微电系统两部分组成。
4.7.1车电控制系统
车电控制系统已广泛应用于我公司生产的液压平板车上,控制方式已很成熟。
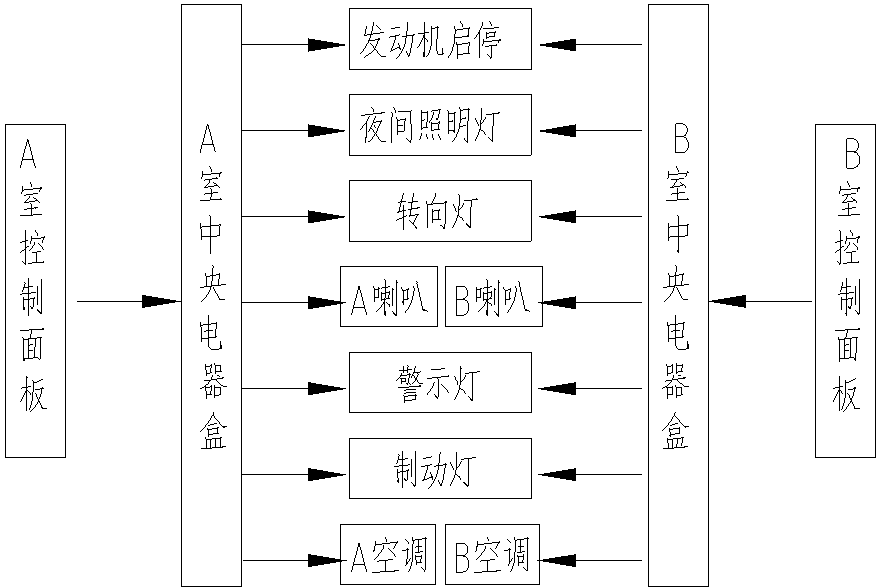
图4.5 车电控制系统控制框图
运梁车有A,B两个驾驶室,分别位于车体两头,驾驶室的控制权可以通过各个驾驶室的钥匙开关进行切换,具有互锁功能;驾驶室的车电控制面板上装有控制按钮和各种监视仪表;按钮开关通过中央电器盒来控制各种电器,如图4.5所示,中央电器盒上装有大电流继电器和保险用来控制和保护上述电器。监视仪表包括发动机转速表、机油压力表、水温表、电压表、油位表、小时计等各种仪表,主要监视发动机工作状况。
4.7.2微电控制系统
运梁车的微电控制系统采用CAN总线技术,所有的电气控制均由一套基于现场总线(CAN-BUS)的PLC控制系统来实现,CAN总线的布置如图4.6所示。现场总线控制技术是目前工程机械上最先进、最可靠的控制方式,其优点为:⑴电缆布线简单,节点少,可靠性高,连接检查方便;⑵容易进行故障诊断和运行状态记录,有利于维修检查;⑶设置控制点方便,容易更改参数和增减功能;⑷能适应露天、雨雪、灰尘、振动等野外作业的恶劣环境。
图4.6 运梁车CAN总线布置图
微电控制系统由6个控制器组成,控制器之间通过CAN总线进行通讯;通过A,B驾驶室可以控制车的行走、转向和升降,控制权和车电控制系统一样,通过钥匙开关切换。
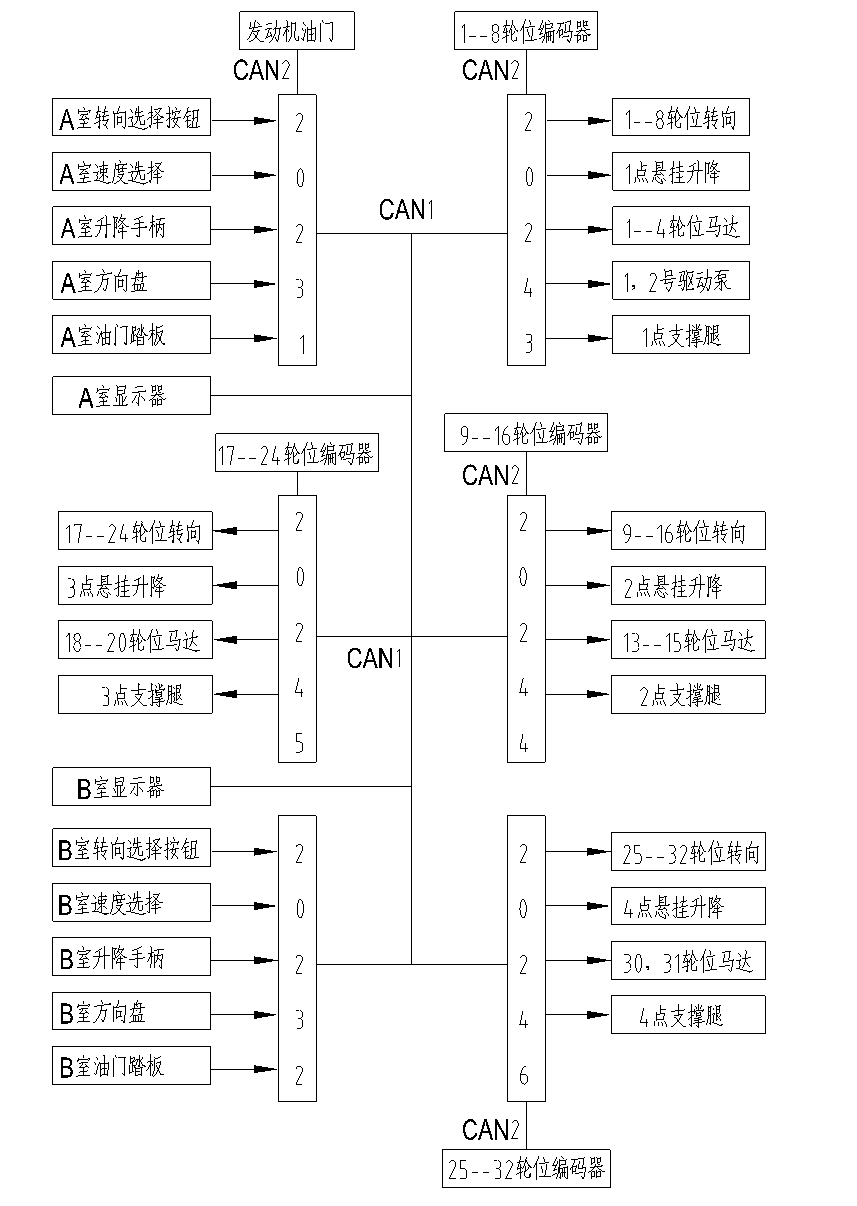
图4.7 微电控制系统控制框图
4.7.2.1行走控制
本车有三种速度:高速、低速和微动,并且具有防打滑功能,速度改变是通过控制器来改变马达和驱动泵的电流大小来实现的;行进方向可以通过改变驱动泵的电流方向来实现。
- 我的微信
- 这是我的微信扫一扫
-

- 我的微信公众号
- 我的微信公众号扫一扫
-








来自外部的引用: 1